银川车牌识别报价






- 面议
- 2024-11-11 17:43:28
- 车牌识别
- 填写你的真实姓名 15098981411
- 济南恒成门业有限公司

- 新浪微博


- QQ空间


- 豆瓣网


- 百度新首页

信息介绍
详细参数
将车牌识别设备安装于出入口,记录车辆的牌照号码、出入时间,并与自动门、栏杆机的控制设备结合,实现车辆的自动管理。应用于停车场可以实现自动计时收费,也可以自动计算可用车位数量并给出提示,实现停车收费自动管理节省人力、提率。应用于智能小区可以自动判别驶入车辆是否属于本小区,对非内部车辆实现自动计时收费。在一些单位这种应用还可以同车辆调度系统相结合,自动地、客观地记录本单位车辆的出车情况。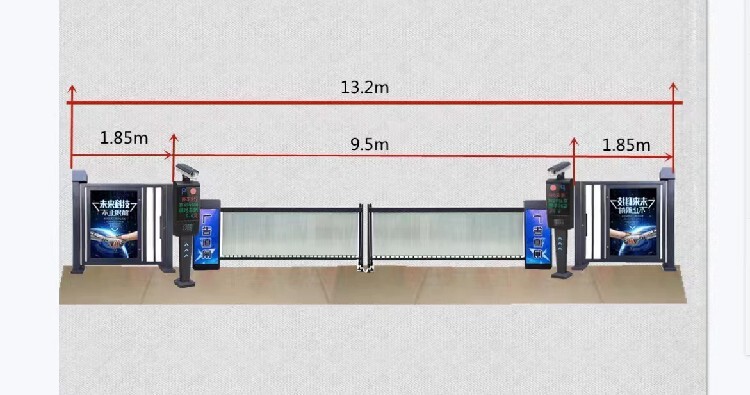
一个车牌识别系统是否实用,重要的指标是识别率。国际交通技术作过的识别率指标论述,要求是24小时全天候全牌正确识别率85%~95%。信路通的车牌识别系统在实际应用中已经达到了全牌正确识别率90%以上。为了测试一个车牌识别系统识别率,需要将该系统安装在一个实际应用环境中,全天候运行24小时以上,采集至少1000辆自然车流通行时的车牌照进行识别,并且需要将车辆牌照图像和识别结果存储下来,以便调取查看。然后,还需要得到实际通过的车辆图像以及正确的人工识别结果。
红外光路线是指利用车牌反光和红外光的光学特性,用红外摄像机采集车辆灰度图像,由于红外特性,车辆图像上几乎只能看见车牌,然后用黑白图像处理方法识别车牌。950nm的红外照明装置可抓拍到很好的反光车牌照图像。因红外光是不可见光,它不会对驾驶员产生视觉影响。另外,红外照明装置提供的是不变的光,所抓拍的图像都是一样的,不论是在一天中明亮的时候,还是在一天中暗的时候。的例外是在白天,有时会看到一些牌照周围的细节,这是因为晴朗天气时太阳光的外光波的影响。采用红外灯的缺点就是所捕获的车牌照图像不是彩色的,不能获取整车图像,并且严重依赖车牌反光材料。
自然光路线是指白天利用自然光线,夜间采用辅助照明光源,用彩色摄像机采集车辆真彩色图像,用彩色图像分析处理方法识别车牌。自然光真彩色识别技术路线,与人眼感光习惯一致,并且,真彩色图像能够反映车辆及其周围环境真实的图像信息,不仅可以用来识别车牌照,而且可以用来识别车牌照颜色、车流量、车型、车颜色等车辆特征。用一个摄像机采集的图像,同时实现所有前端基本视频信息采集、识别和人工辅助图像取证判别,可以前瞻性的为未来的智能交通系统工程预留接口。
采用计算机视觉技术识别车牌的流程通常都包括车辆图像采集,车牌定位,字符分割,光学字符识别,输出识别结果5个步骤。车辆图像的采集方式决定了车牌识别的技术路线。目前国际ITS通行的两条主流技术路线是自然光和红外光图像采集识别。自然光和红外光不会对人体产生不良的心理影响,也不会对环境产生新的电子污染,属于绿色环保技术。
当车辆接近出入口的时候,车辆检测器会自动感应到车辆的到来,然后触发车牌识别一体机进行图像抓拍,然后将抓拍的图像发送到数据处理服务器,安装在数据服务器上的车牌识别软件对图像进行处理,定位出牌照位置,再将车牌中的字符分割出来进行识别,然后组成车牌号码保存下来,图像和车牌号码均保存在数据处理服务器上。
字符识别方法目前主要有基于模板匹配算法和基于人工神经网络算法。基于模板匹配算法将分割后的字符二值化,并将其尺寸大小缩放为字符数据库中模板的大小,然后与所有的模板进行匹配,后选佳匹配作为结果。基于人工神经元网络的算法有两种:一种是先对待识别字符进行特征提取,然后用所获得特征来训练神经网络分配器;另一种方法是直接把待处理图像输入网络,由网络自动实现特征提取直至识别出结果。
为了进行牌照识别,需要以下几个基本的步骤: · 牌照定位,定位图片中的牌照位置; · 牌照字符分割,把牌照中的字符分割出来; · 牌照字符识别,把分割好的字符进行识别,终组成牌照号码。 牌照识别过程中,牌照颜色的识别依据算法不同,可能在上述不同步骤实现,通常与牌照识别互相配合、互相验证。
车辆检测可以采用埋地线圈检测、红外检测、雷达检测、视频检测等多种方式。采用视频检测可以避免破坏路面、不必附加外部检测设备、不需矫正触发位置、节省开支,而且更适合移动式、便携式应用的要求。具备视频车辆检测功能的牌照识别系统,对视频信号中的一帧(场)的信号进行图像采集,数字化,得到对应的数字图像;然后对其进行分析,判断其中是否有车辆;若认为有车辆通行,则进入到下一步进行牌照识别;否则继续采集视频信号,进行处理。系统进行视频车辆检测,需要具备很高的处理速度并采用的算法,在基本不丢帧的情况下实现图像采集、处理。若处理速度慢,则导致丢帧,使系统无法正确检测到行驶速度较快的车辆,同时也难以在有利于识别的位置开始识别处理,影响系统识别率。因此,将视频车辆检测与牌照自动识别相结合具备一定的技术难度。
- 车牌识别
- 车牌识别仪
- 填写你的真实姓名



